
Research - Norwegian Centre for Embodied AI
Research and innovation

Primary objective
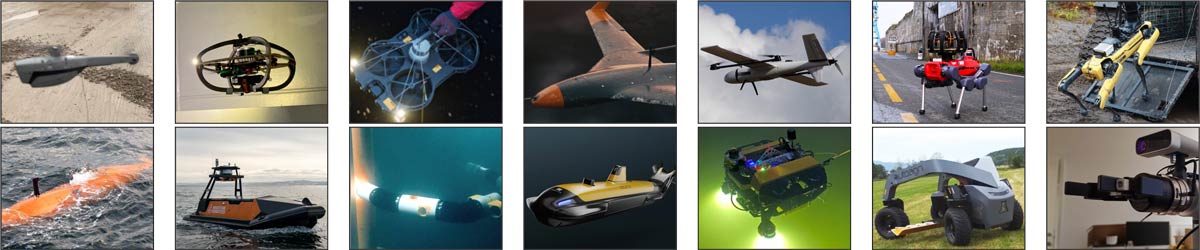
The Norwegian Centre for Embodied AI (NCEI) aims to establish a Universal Science of Embodied AI that enables robots with diverse morphologies across aerial, ground, and aquatic platforms, to achieve nature-like autonomy and performance. The centre will advance fundamental research in key sub domains of Embodied AI while developing a reconfigurable autonomy architecture that integrates perception, learning, control, and computational co design of a robot’s “brain” and “body.” Through this unified and adaptable scientific framework, NCEI seeks to revolutionize how robots are designed and operate in the physical world, positioning Norway as a global leader in physical intelligence and agility research, particularly under the world’s most demanding environmental conditions. The secondary objectives of the project are:
- Robot “body-brain computational co-design” – robots should not be ‘merely’ human-engineered but derived by a computational loop driving body evolution as per the fitness of their autonomy policies.
- Resilient & Rich Robot Perception – through core breakthroughs in implicit & explicit representations for GNSS-denied navigation and mapping, as well as semantic object-level scene reasoning.
- Generalizable Navigation Policies across Embodiments – Investigation of common, re-configurable, architectures for navigation autonomy across flying, ground, surface & underwater robots.
- Generalizable Whole-body Manipulation – Ability to conduct dexterous grasping and whole-body manipulation with focus on generalizable yet re-configurable policies for ground/underwater robots.
- Common Sense Reasoning and Planning – To solve complex high-level reasoning-to-action plans (e.g., assemble a machine, perform physical repairs) derive a generalist cognition-planning strategy.
Work packages
The research programme of the centre is built around the scientific foundations of Embodied AI. We explore how perception, navigation, manipulation, and reasoning can be coordinated within flexible autonomy architectures that operate safely and robustly across robot types and operational domains.



Our work spans multimodal perception, scene understanding, world models, generalizable policies, whole-body control, and the computational codesign of robot bodies and autonomous capabilities.
By combining simulation-driven evolution, real-world experimentation, and fundamental theory, we aim to define the next generation of algorithms, models, and design principles for physically agile and intelligent autonomous robots.
Our research and innovation activities are structured around a comprehensive programme of Work Packages (WPs) that together advance the scientific foundations, technological capabilities and societal deployment of Embodied Artificial Intelligence.
Simulation as Learning & Testing Basis for Embodied AIs
“Body-and-Brain” Computational Co-design
Perception for Embodied Scene Cognition
GANPs across Robot Embodiments

Generalizable Policies for Whole-body Manipulation

Common-sense Reasoning and Planning
Benchmarking Physical Intelligence and Agility

Field Testing & Hardening of Embodied AI











