
Project 3: Autonomous unmanned vehicles - AMOS
Autonomous unmanned vehicle systems
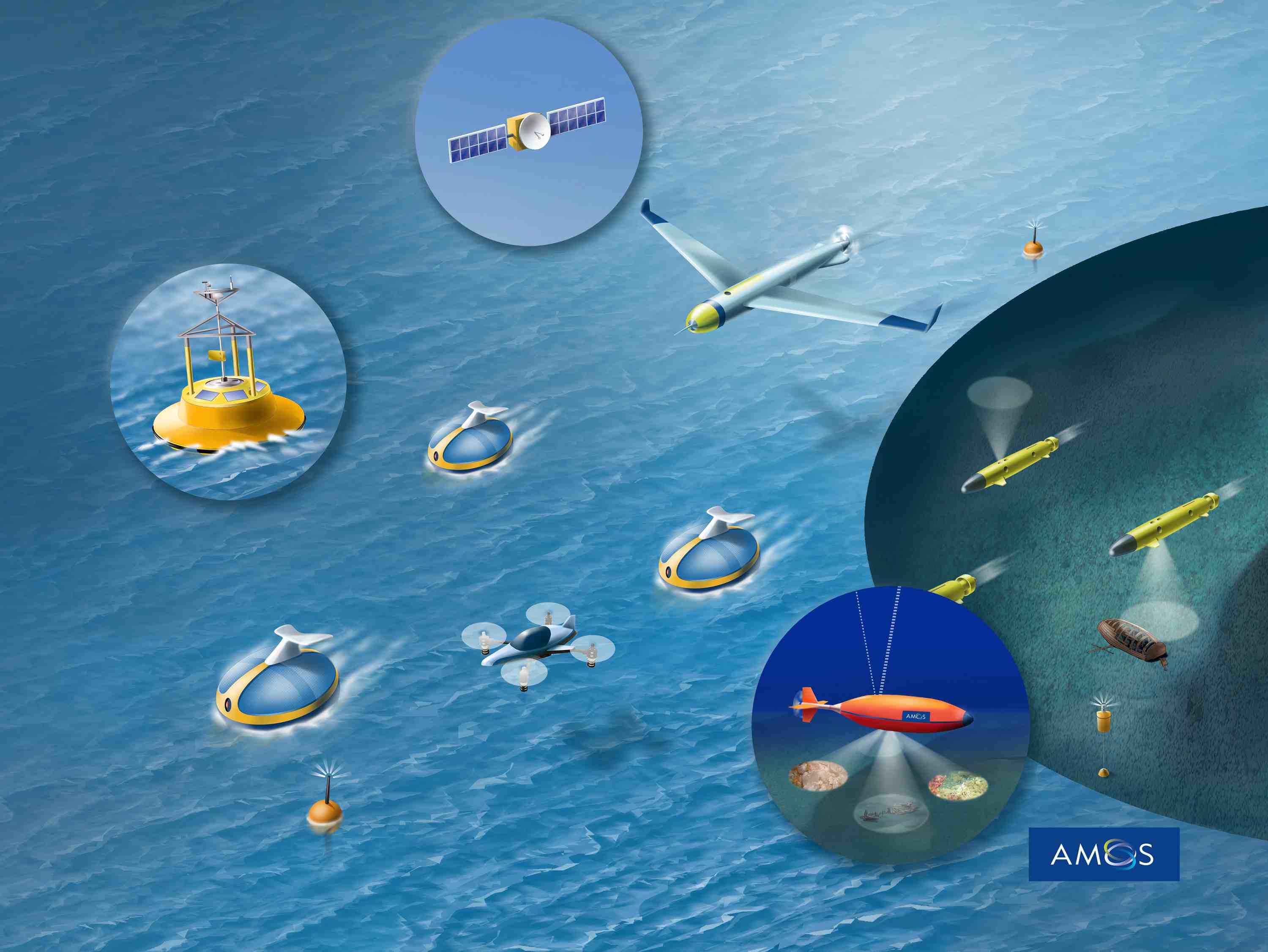
This project is dedicated to the study of fundamental challenges that need to be solved to enable fully autonomous vehicle systems to support marine operations. This provides a common foundation for autonomous unmanned underwater vehicles, surface vessels, aerial vehicles, and other systems such as floating structures, offshore robots, and nodes of a mobile sensor networks.
The outcomes will be robust ad. hoc. mesh network architectures for communication between heterogeneous vehicle systems and sensor networks, capable of handling degraded and time-varying radio and hydroacoustic communication channels in the context of delay tolerant networking. Nonlinear observer theory will lead to new efficient algorithms for sensor fusion of inertial, magnetic, range/position, velocity, and imaging sensors. Target detection and tracking, based on imaging sensors, are elements of the research. Further outcomes are new methods for multi-vehicle distributed mission and path planning, using optimization and heuristic search methods in combination with sensory and estimation information, terrain models, and simulations of vehicles and communication channel losses. These developments will be accompanied by new architectures and algorithms for fault-tolerant and intelligent command execution in autonomous unmanned vehicles, including obstacle avoidance and re-configurable control. The above research outcomes will be experimentally demonstrated in collaboration with Projects 4 and 5.
Project manager

Professor Tor Arne Johansen
NTNU Department of Engineering Cybernetics
Centre for Autonomous Marine Operations and Systems (NTNU AMOS)