
News & Events
News & Events 2022-2023

We are approaching the end of the 10-year-period of the Centre of Excellence scheme. 30th June 2023 NTNU AMOS is closing. Tuesday 6th June we are going to celebrate NTNU AMOS in Trondheim with national and international guests.
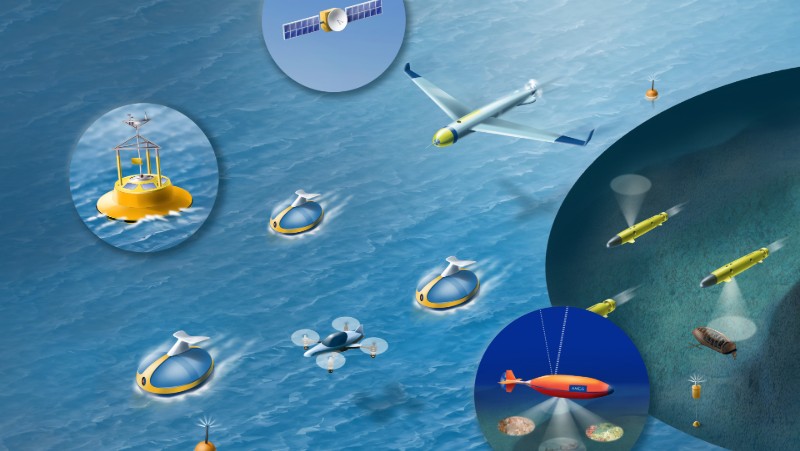
“We often talk about this observational pyramid, from satellites to drones to surface vehicles to underwater vehicles to sea floor,” says Berge. “I think that’s the future, with a much stronger focus on autonomous platforms.”

Erlend A. Basso and Henrik M. Schmidt-Didlaukies have received the Best Student Paper Award of the 12th IFAC Symposium on Nonlinear Control Systems. Basso receiving the award in the picture above.

"Life on the foreshore, from 10 meters and to the shore, is not mapped yet," says Kasper Hancke, leader of the drone project Seabee.

The sabotage of Nord Streams gas pipes show that subsea infrastructure is vulnerable. Norway has almost 9000 kilometer of pipelines with gas, a lot of subsea structures, fiber cables and cables for electricity on the seabed. Is it possible to protect?

AMOS Day in November will be in the city of Trondheim. Have a look at the program here!
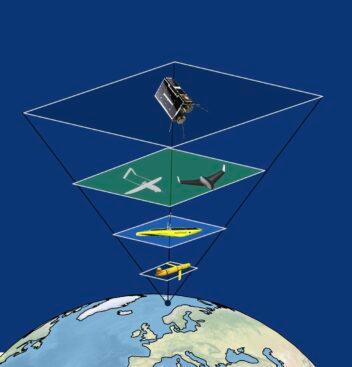
Kongsfjorden Svalbard: On the same place at the same time a small satellite - Hypso-1, a flying drone (UAV), an unmanned surface vehicle (USV) and subsea robots (AUV's) did data collection with a variety of sensors and cameras.

Markus H. Iversflaten, PhD at NTNU AMOS and Caros, received the IFAC CAMS 2022 Young Author Award.

My first expedition to Ny-Ålesund, Svalbard, was about observing, absorbing, and participating in big data collection in action. The trip was months delayed due to the pandemic. And it was absolutely magic.

Geir Johnsen, Professor at the Department of Biology, wins the award Communicator of the year 2022 at the Faculty of Natural Sciences (NV) at NTNU.
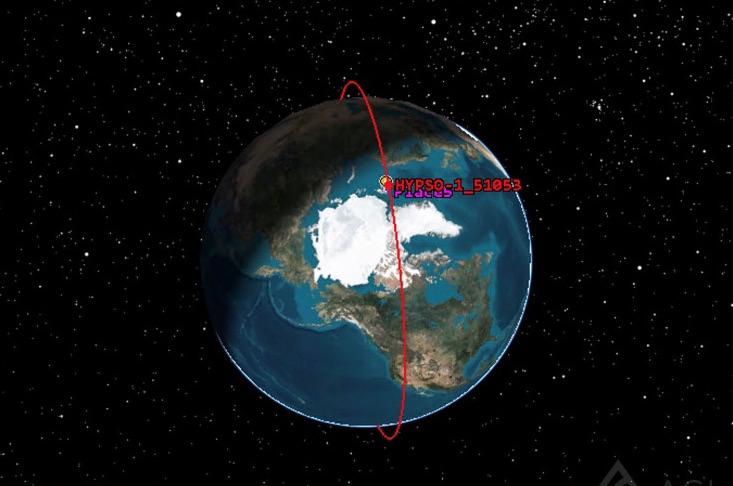
The small satellite HYPSO-1, built by more than 80 students and researchers at NTNU AMOS, the Department of Engineering Cybernetics and the Department of Electronic Systems – and other departments, has participated in several research missions already.
 AMOS Seminar 1-2 June 2022 at Skifer Hotel Oppdal.
AMOS Seminar 1-2 June 2022 at Skifer Hotel Oppdal.

Professor Jing Sun, University of Michigan is visiting NTNU AMOS this spring. Jing is indeed a world leading professor. She will give three lectures in May and June.
 Celebration of HYPSO-1 and time to say some words: Professor Tor Arne Johansen (upper left), Dean Ingrid Schjølberg (upper right), PhD Evelyn Honore-Livermore (down left) and master student Simon (down right).
Celebration of HYPSO-1 and time to say some words: Professor Tor Arne Johansen (upper left), Dean Ingrid Schjølberg (upper right), PhD Evelyn Honore-Livermore (down left) and master student Simon (down right).
AMOS last annual report contains features and profiles of the professors Geir Johnsen, Marilena Greco and Kostas Alexis, and the PhD Evelyn Honoré-Livermore, postdoc Kate Crosman an researcher Glaucia Fragoso.
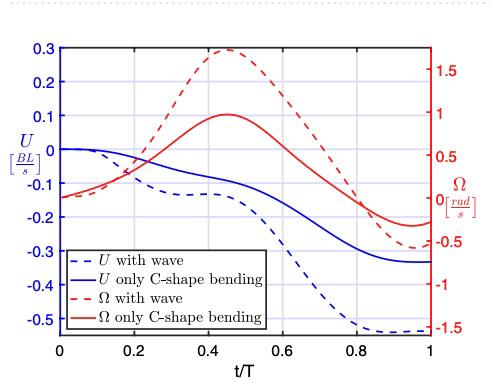
The fish ability to accelerate and suddenly turn in fast manoeuvers, is the title of the scientific report featured in Nature from March 23 2022, with researchers from Sapienza University of Rome, Harbin Engineering University in China and NTNU AMOS.

«The future looks busy and bright,» Arne Kjørsvik, daily manager of SentiSystems said. SentiSystems is one of the eight spin off companies from NTNU AMOS.
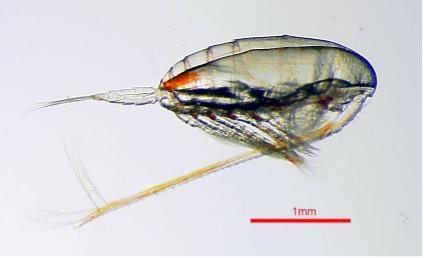
The zooplankton Calanus finmarchicus will be the starting point for Kate Crosman’s work to understand trust in Big Ocean Data. How? Read on.

Four PhD-Candidates or researchers from NTNU AMOS presented technology and research developed at our Centre of Excellence.

Photo: Team CERBERUS
Team Cerberus has won a highly prestigious international competition with their subterranean robots, competing against top-ranked challengers. The group is headed by NTNU professor Kostas Alexis.

Photo: SpaceX
HYPSO-1, the first research satellite from the NTNU SmallSatLab launched Thursday 13.01.22, at 10:25 EST (16:25 Norwegian time) with a SpaceX Falcon 9 Transporter-3 from Cape Canaveral Space Launch Complex 40 in Florida, USA.
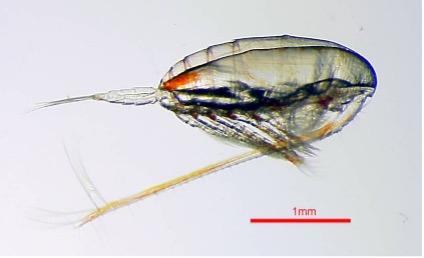
The zooplankton Calanus finmarchicus will be the starting point for Kate Crosman’s work to understand trust in Big Ocean Data. How? Read on.

A subsea snake robot with connections to NTNU and AMOS is the hero in the Norwegian movie Nordsjøen from Fantefilm Fiksjon with premiere on Friday 29th October.

The first TAC Challenge event was arranged this summer. The student organisation Ascend from NTNU won the challenge. Next year the challenge will include international teams as well.

Finally it is possible to meet again!
AMOS Day at Scandic Nidelven! October 20 with dinner and a special screening.

Professor Kristin Ytterstad Pettersen, at the Department of Engineering Cybernetics, wins NTNU employee prize for her groundbreaking research. She is one of seven key researchers in NTNU AMOS. Read more here.
Two professors at NTNU have been awarded prestigious ERC Advanced Grants by the European Research Council.
Professor Kristin Ytterstad Pettersen at AMOS and Department of Engineering Cybernetics and Professor Henrik Koch at Department of Chemistry have each been awarded the prestigious ERC Advanced Grant by the European Research Council.
Each grant can provide up to NOK 25 million in support over five years.
The second edition of a popular textbook Handbook of Marine Craft Hydrodynamics and Motion Control, authored by Professor Thor I Fossen, from the Norwegian University of Science and Technology (NTNU) is just released.
The NTNU AMOS annual report for 2020 is out. You can read it here.

Waves present an enormous challenge for the world’s roughly 91,000 commercial vessels, but predicting sea conditions is challenging. A new approach uses the movements of ships themselves to create an online estimate of what kinds of waves ships can expect.

A new partnership between the Centre for the 4th Industrial Revolution Ocean and the Norwegian University of Science and Technology (NTNU) has been established to establish trust in ocean data collected from autonomous underwater vehicles.

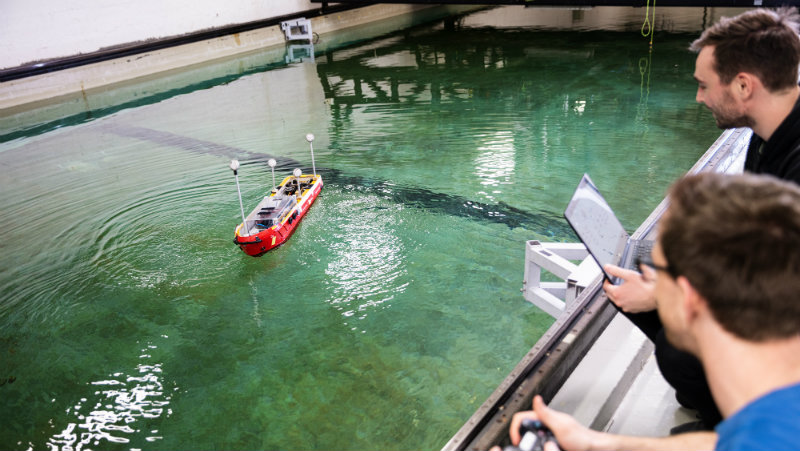
From a user perspective, the case for autonomous, zero-emission ferries is very appealing. Such vessels could solve both the transport and environmental needs of cities and local communities, while helping to decongest heavy traffic in urban centres.
The primary objective of TRUSST is to innovate an integrated assurance framework that takes as point of departure the insight that autonomous transport systems are formed by a complex and interdependent system of people, technology, organisations, regulators and the natural environment.
The IEEE OES Autonomous Maritime Systems Rising Star Award for 2020 has been awarded to Martin Ludvigsen at the Department of Marine Technology and NTNU AMOS.
NTNU AMOS and Department of Biology postdoc Glaucia Moreira Fragoso has secured a grant of 7.2 million NOK from the Norwegian Research Council (NFR) through NFR’s “Researcher Project for Young Talents” initiative. The initiative’s purpose is to “give talented young researchers under the age of 40 in all disciplines and research areas the opportunity to pursue their own research ideas.

On Monday 7 December, Rector Anne Borg, NTNU, and the head of the European Space Agency ESA Johann-Dietrich Wörner signed an agreement on cooperation. The Faculty of Information Technology and Electrical Engineering hosts the agreement.


We know that many ships, trucks, and even ammunition have been dumped or sunk in Norway’s largest lake. This year saw the start of a large research project to discover what is hidden in the deep.
Autonomous vehicles are in the wind like never before. At NTNU, researchers have developed a circuit board that can be adapted to different drones with simple steps. Airbus has tested the system on a prototype for lunar landing.

In 1693, near Smeerenburg at the northwestern tip of Spitsbergen, more than 17 Dutch whaling ships were sunk by a French fleet following direct orders from King Louis XIV.
Now an interdisciplinary research team from NTNU and UIT, using AMOS technology, have gone looking for the lost fleet. What they found was surprising and worrying.


What happens when everything that can go wrong, goes wrong? That is the topic for Tore Mo-Bjørklund's recent blog post.

AMOS Director, Professor Asgeir Sørensen, has participated in the first Technoport Podcast. He talked about Norway's maritime potential, cybernetics, Greta Thunberg and how to start real change and progress here:
AMOS Director, Professor Asgeir Sørensen, has participated in the first Technoport Podcast. He talked about Norway's maritime potential, cybernetics, Greta Thunberg and how to start real change and progress here:

The Norwegian Science Academy (DNVA) and Equinor are providing 25 million NOK to a new research center at NTNU. The center will increase our knowledge of the ocean by developing new underwater-robotics technology.
The new promise of funding from the Norwegian government ensures that the project will not suffer any delays in the coming year.


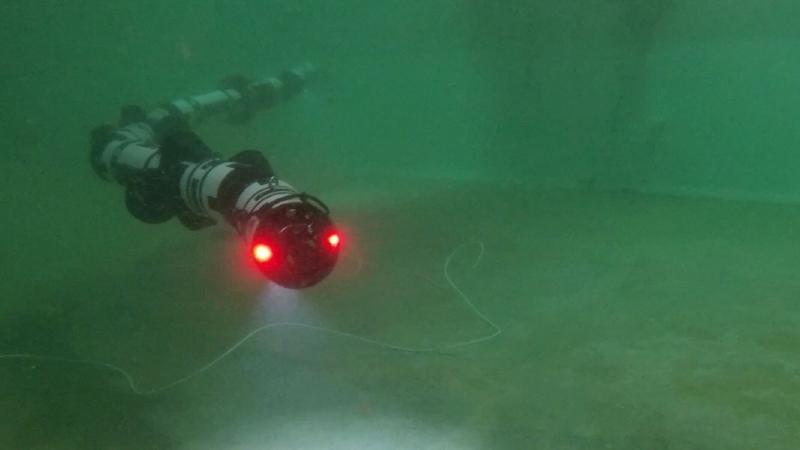
NTNU have bought a six-meter-long snake-drone. The drone is made by Eelume and will be tested and operated in the Trondheim fjord.
PhD candidate at NTNU AMOS and the Department om Technical Cybernetics, Kristoffer Gryte, has been working on alternative GPS solutions for his doctorate. His results could change the way we operate commercial drones.

In recent articles at Aftenposten and Fiskeri and Havbruk, Director of NTNU AMOS and professor at the Department of Marine Technology, Asgeir Sørensen, writes about how changing climate presents considerable challenges for arctic areas.

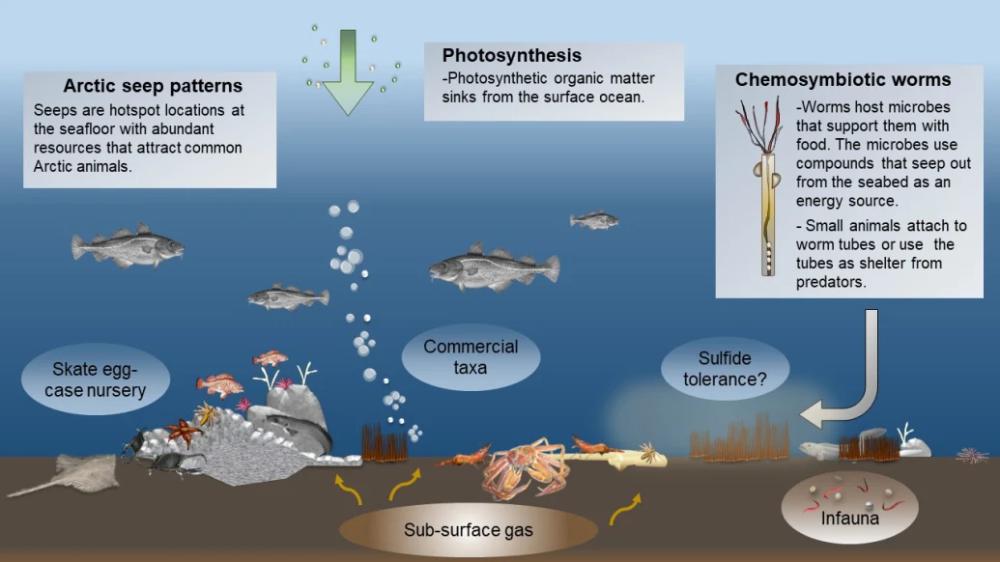
NTNU ocean survey technology, operated by professor Martin Ludvigsen's AUR-team, has helped researchers at UiT Norges arktiske universitet survey hydrocarbon seeps in the Arctic Oceans.
 The
The
NTNU AMOS annual report for 2019 is out. You can read it here.

The research conducted at NTNU AMOS is opening new ways of understanding the world, but knowledge is only useful if people are aware of it, and when you want to reach a larger audience, what better way than to make a movie?

Researchers at NTNU AMOS, in collaboration with researchers at the Talinn University of Technology and the Estonian University of Life Science, have shown how "turtle robots" are less intrusive to the salmon in Norwegian fish farms.
Erlend Andreas Basso at NTNU in Trondheim (Cybernetics and Robotics) won the NFEA's award for best master's thesis 2019, with the thesis: «Dynamic Task Priority Control of Articulated Intervention AUVs Using Control Lyapunov and Control Barrier Function based Quadratic Programs »

The startup’s autonomous system senses and melts frozen buildup
In 2013 Ph.D. candidate Kim L. Sorensen and his advisor, IEEE Senior Member Tor Arne Johansen, talked with U.S. Coast Guard representatives about a relatively new challenge for the military: the buildup of ice on drones and other unmanned aerial vehicles. UAVs weren’t outfitted with protection to eliminate ice buildup.

The startup’s autonomous system senses and melts frozen buildup
In 2013 Ph.D. candidate Kim L. Sorensen and his advisor, IEEE Senior Member Tor Arne Johansen, talked with U.S. Coast Guard representatives about a relatively new challenge for the military: the buildup of ice on drones and other unmanned aerial vehicles. UAVs weren’t outfitted with protection to eliminate ice buildup.
A new spin off from the AMOS research community has just been lunched. The new company seeks to develop effective and climate neutral mini-ferries that can be a cheap and climate friendly alternative to bridges and traditional ferries in cities.

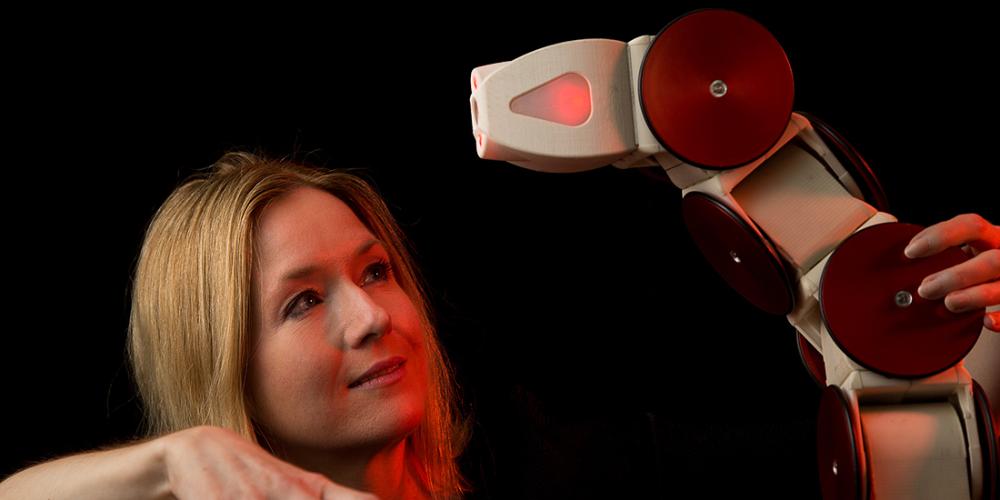
Researchers have worked on the idea of snake robots for more than 30 years, but the greatest breakthrough so far was done by key scientist at NTNU AMOS Professor Kristin Ytterstad Pettersen and her colleagues. In recognition of this work, Pettersen has been awarded the Bode Lecture Prize.
AMOS days 2019 gathered 115 scientists and researchers to a conference where the latest development within the AMOS research projects were presented. Professor Asgeir Sørensen opened the day by welcoming new PhD candidates and researchers and comparing what we do at AMOS with Elite sports, saying that at AMOS “you will find the best of the best within our fields”.

The Autonomy Cluster in Trondheim is one of Innovation Norway’s new cluster projects. NTNU Amos has been one of the key driving forces behind the cluster, and the Director of Amos, Professor Asgeir Sørensen, thinks the cluster could open a whole new chapter in ocean-based autonomy research.

NTNU Rector, Anne Borg, and head of REV Ocean, Nina Jensen, have signed a partnership agreement to start a cooperation on marine robotics and use of the new REV Ocean research ship. This opens up great opportunities for NTNU in terms of access to a world-leading ocean exploration vessel, and will provide REV Ocean with access to world-leading research groups at NTNU.

PhD candidate at AMOS, Richard Hann, has received an outstanding oral presentation award from the SAE for their International Icing conference 2019.

Location: B337, 3rd floor, Elektro B at the Gløshaugen.
29 October 2019, Scandic Lerkendal Hotel, Trondheim.
From 2019, the Department of Marine Technology at NTNU offers students that have a special interests for research a new program that prepares and kick-starts the participant for future PhD studies.
First out is Martin Kvisvik Larsen, a fifth year master student who specializes in marine cybernetics.
The Norwegian Research Council are investing in new research infrastructure projects all over Norway, and two AMOS related projects will now receive funding.
Prime Minister Erna Solberg has confirmed that the Norwegian government has allocated 55 million NOK in the 2020 government budget to the Ocean Space Centre project.

Icing of drones is a severe hazard that significantly limits the usage of autonomous unmanned aerial vehicles. Researchers from NTNU AMOS recently conducted experiments in an icing wind tunnel to learn more about icing in order to test an icing protection system.

Professor Asgeir Sørensen has received the Norwegian Research Council’s innovation prize for 2019. The price is granted to a person or organization that through exceptional use of research result have laid the foundation for research based innovation.

From 2019, the Department of Marine Technology at NTNU will offer its students a new researcher’s program that prepares the participant for PhD studies.
Kristin Ytterstad Pettersen, professor at the Department of Technical Cybernetics and Key Researcher at NTNU AMOS, has given a lecture on snake robots, at the science festival "The Big Challenge".
NTNU launches our deepest laboratory yet, almost 370 meters below the surface of the Trondheim fjord.

Seminars
June 30 2024 - the Final AMOS seminar - Clarion Hotel Trondheim
March 28 2023 - Trondheim Tech Port Conference - themes: Bridging the gaps, Futuristic Oceans
May 13 2023 - Guest Lecture Professor Jing Sun, University of Michigan Integrated Power and Thermal Management: Estimation, Prediction, and Control
June 1-2 2023 AMOS Day at Skifer Hotel Oppdal
November 9 2023 AMOS Day at Radisson SAS Trondheim
Archives for news & events:
- News & Events in 2021
- News & events in 2020
- News & events in 2019
- News & events in 2018
- News & events in 2017
- News & events in 2016
- News & events in 2015
- News & events in 2014
- News & events in 2013
- News & events in 2012