
Project 4: Autonomous underwater robotics - AMOS
Autonomous underwater robotics for mapping, monitoring and intervention
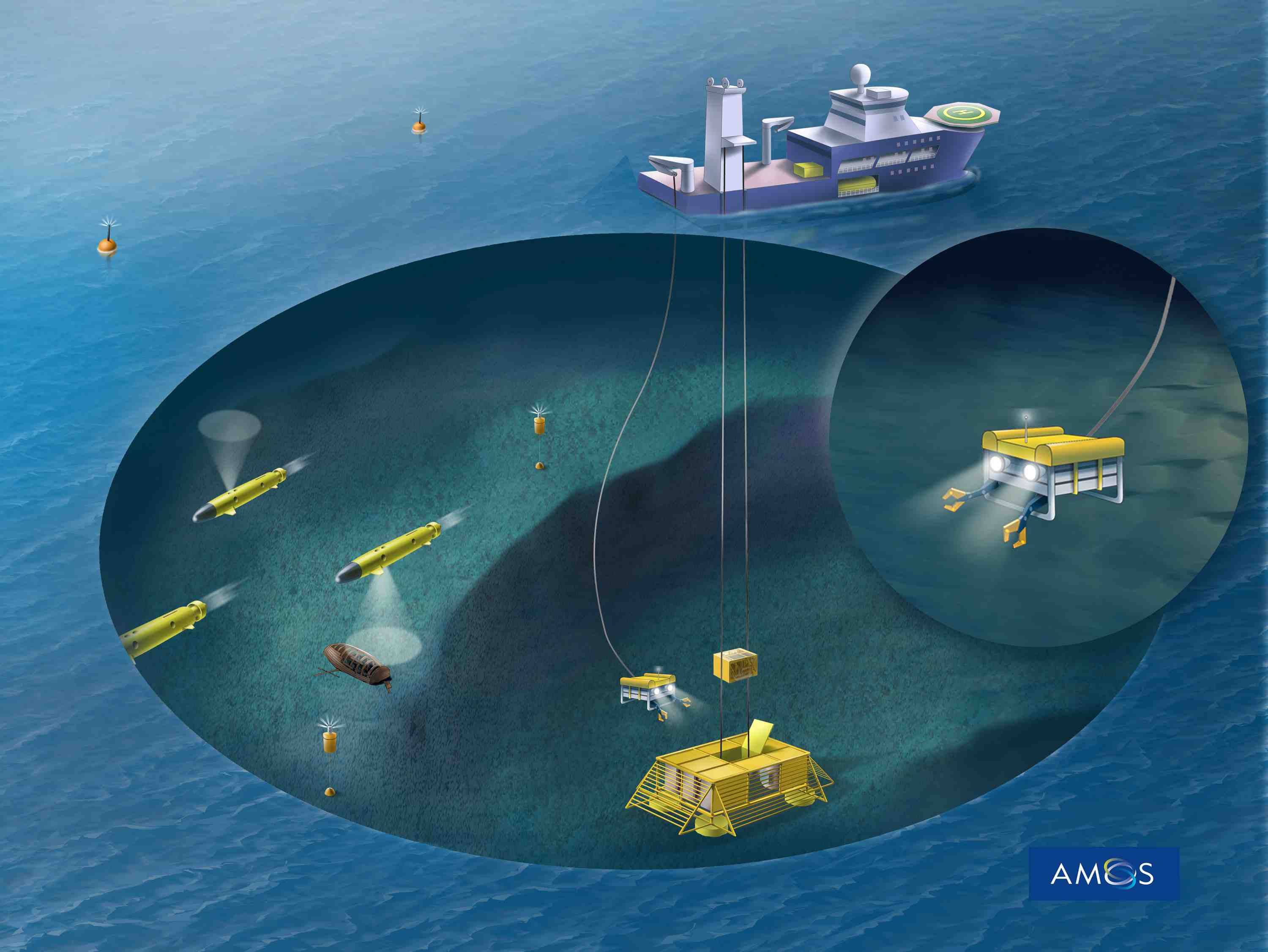
The project is on fundamental research on methods for autonomous underwater operations and systems including one or several underwater robots such as ROVs and AUVs, and other sensor platforms. In addition intervention operations with combined vehicle and manipulator control will be studied. The main task will be to increase the level of autonomy and robustness for automatic mapping, monitoring and intervention, high-level planning/re-planning and reconfiguration of single and multiple vehicles subject to the particular mission, environmental condition, available energy, communication constraints, and any failure conditions. This presents research challenges related to endurance, permanently submerged operations, GNC, simultaneously location and mapping (SLAM), under ice operations, deep-water operations and energy optimization. Furthermore, the research includes tasks on cooperative control and information optimization.
The outcomes will be: development of methods for automation of tasks and functions using mathematical models, real-time data and advanced algorithms such as numerical optimization and nonlinear control, real-time sensor fusion combining one or several sensors for identification, mapping and monitoring bio-geo-chemical objects of interest (OOI) of seabed. This project will be experimentally oriented with numerous demonstrations using the AUR-lab facilities.
Project manager

Professor Kristin Y. Pettersen
NTNU Department of Engineering Cybernetics
Centre for Autonomous Marine Operations and Systems (NTNU AMOS)
Videos from project 4


