
Project 5: Autonomous UAV - AMOS
Autonomous aerial systems for marine monitoring and data collection
The main research challenges of marine Unmanned Aerial Vehicle (UAV) operations are due to requirements for fuel/weight, reliability and operational safety, and in particular related to autonomy, communication, guidance and navigation.
UAVs that carry sensors, communication equipment and other payloads can support operations such as ice management in the Arctic, monitoring of resources and environmental parameters such as oil spills, and monitoring of traffic and operations at sea.
In order to allow complex missions or tasks, UAVs will require autonomous mission planning capabilities to support simultaneous operations with multiple UAVs and other vessels.
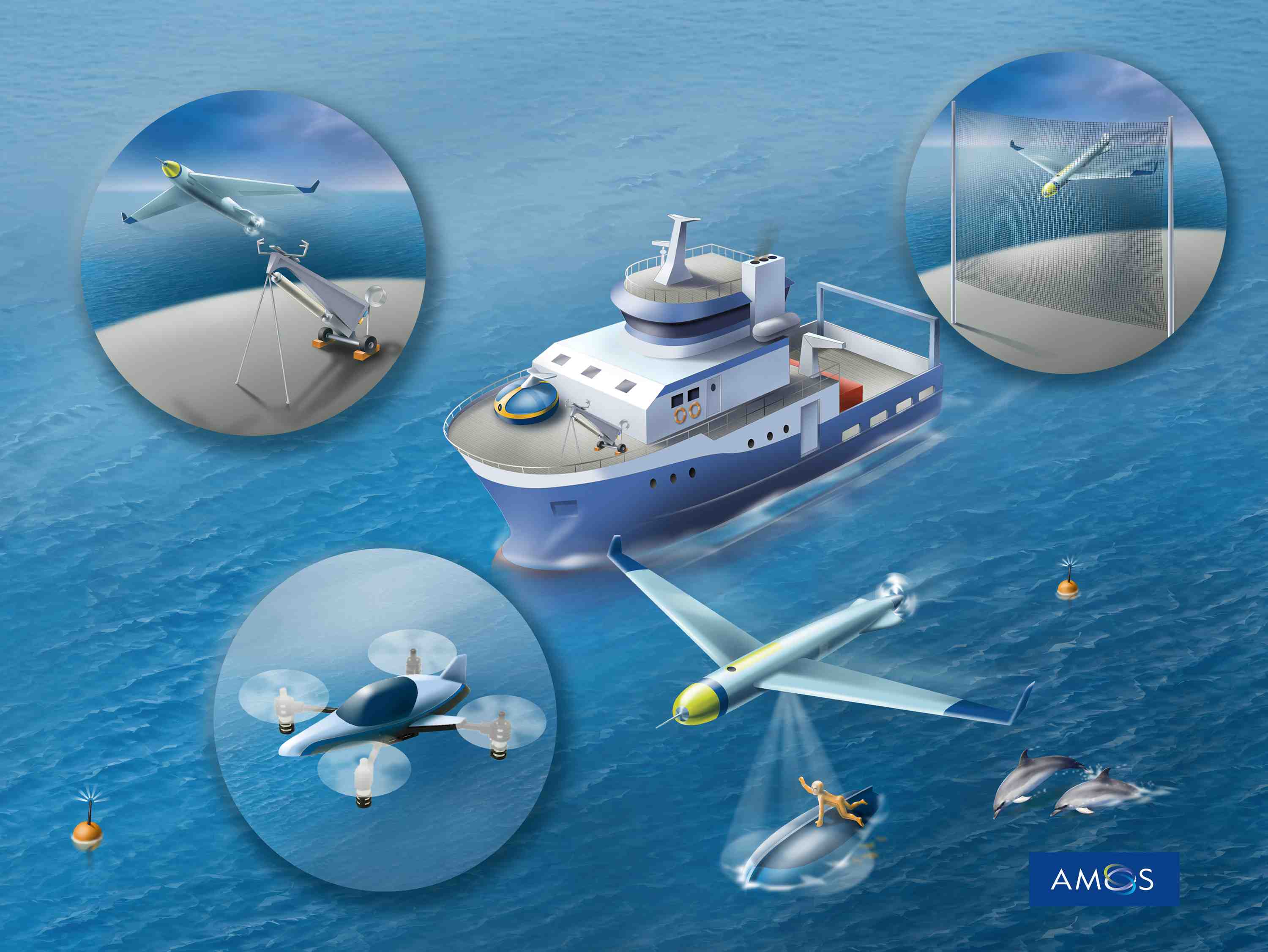
The research will focus on operations with UAVs that have the capability to handle a number of operational events without operator input, including intelligent command execution with path re-planning, energy management, fault-tolerant control, automatic launch and recovery from ships, operational safety and collision avoidance, management of communication quality of service, and online pursuit of mission objectives based on real-time payload sensor data information processing such as object tracking and obstacle avoidance, as well as optimal trajectory planning for updating estimates of distributed parameter phenomena being observed.
The short-term research outcomes will be robust GNC algorithms for use in UAV systems and demonstrations, while the long-term objective is operation of fully autonomous UAV systems in restricted airspace. Experimental demonstrations will include autonomous maritime launch and recovery from ships, autonomy in ice monitoring applications, research and rescue missions, and environmental monitoring.
Project manager

Professor Thor I. Fossen
NTNU Department of Engineering Cybernetics
Centre for Autonomous Marine Operations and Systems (NTNU AMOS)