Project 7: Autonomous marine operations - AMOS
Autonomous marine operations in extreme seas, violent water-structure interactions, deep waters and Arctic
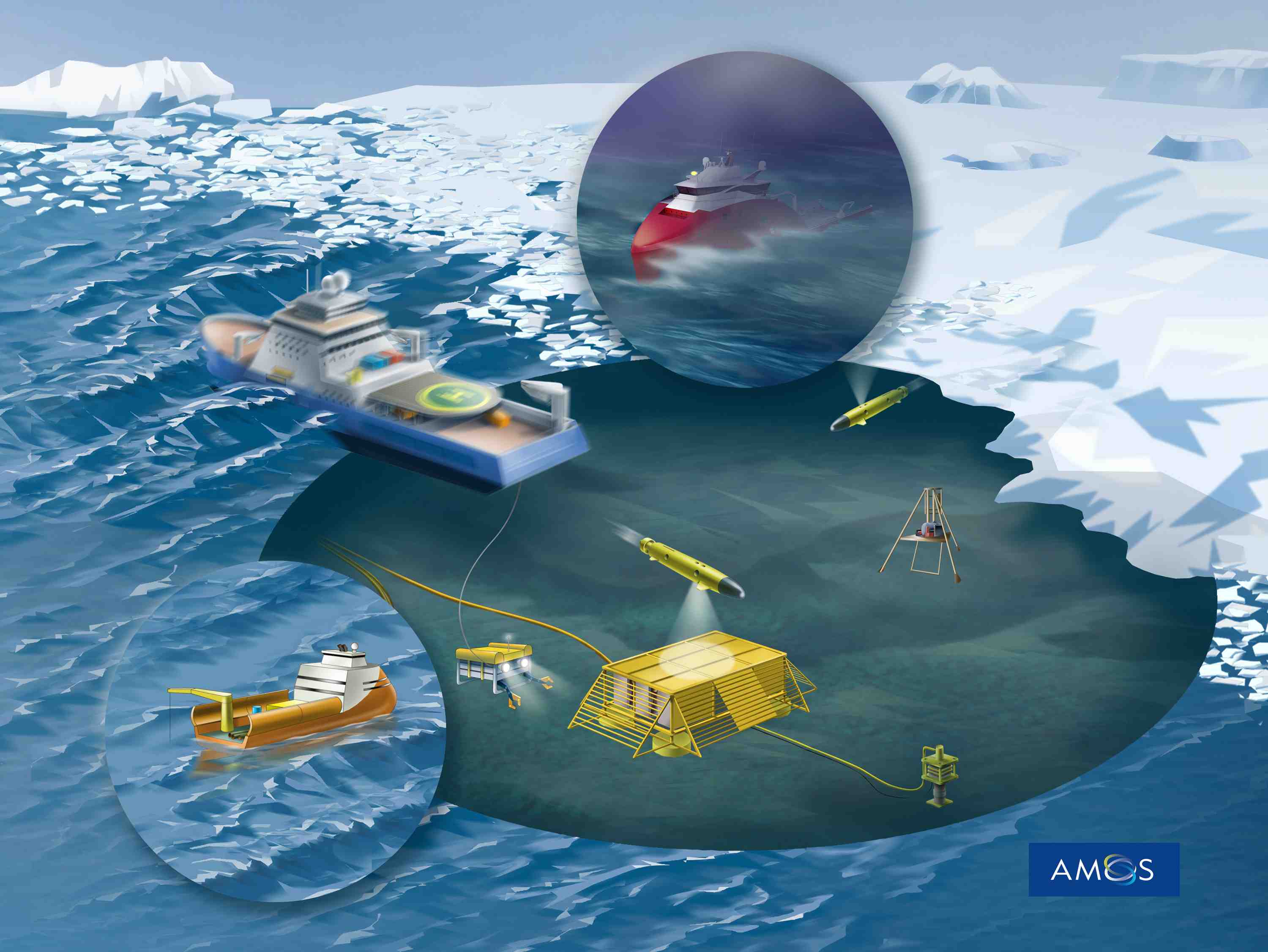
Vessels in extreme sea conditions and violent water-structure interactions will be examined. Fault-tolerant and safe control systems for marine craft and offshore structures operating in deep waters and extreme seas need to be developed.
Expanding on the concept of hardware-in-the-loop (HIL) simulation, the idea is to use real-time simulation to augment physical experiments in a marine scale model basin laboratory to expand its capabilities beyond the physical dimensions of the basin.
For example, the force of a deep-water riser on a DP scale model ship or floater in a shallow basin can be physically transformed by a controlled actuator with force sensors (a robot arm) to a scale model, using a real-time simulator of the riser dynamics.
Key research outcomes are lab-in-the-loop prototype proof-of-concept for such applications in NTNU AMOS laboratories, including validation of the design using full-scale data and numerical simulations.
Calculations of motion and load effects for slender structures, assessment of fatigue, wear and ultimate strength of composite materials are all important for safe operation. This includes characterization of the wave-current-wind environment in extreme weather conditions and reliability assessment of existing sea models and their improvement.
Short-term outcomes are non-linear hydrodynamic models, methods for motion and load effect calculation, and model-based control systems for integrated use of inertial motion units (IMUs) in DP operations, in order to improve autonomy and fault-tolerance.
The long-term outcomes are demonstration of fully autonomous marine operations and new methods for assessment of existing design and safety rules for vessels in extreme seas.
Reports from the Oden Icebreaker Research Cruise

Read the PhD candidates' reports!
Involved PhD candidates from NTNU: Hans-Martin Heyn (NTNU AMOS/SAMCoT/IMT), Jon Bjørnø (SAMCoT/IMT) and Runa Skarbø (CIRFA/BAT)
Read Runa's blog from the research cruise
Follow the PhD candidates on the cruise via X:
@Martin_Heyn
@runaskarbo
Find more information about the expedition on their official website
Project manager

Professor Asgeir J. Sørensen
NTNU Department of Marine Technology
Centre for Autonomous Marine Operations and Systems (NTNU AMOS)
Videos from project 7
Dynamic Positioning (DP) of C/S Enterprise in MC-Lab:

Stationkeeping operations in extreme conditions:
From simulation studies in the office to testing in model scale in the Marine Cybernetics Laboratory:

... to further full scale testing on research vessel Gunnerus:

Masterstudents' dynamic positioning experiments:

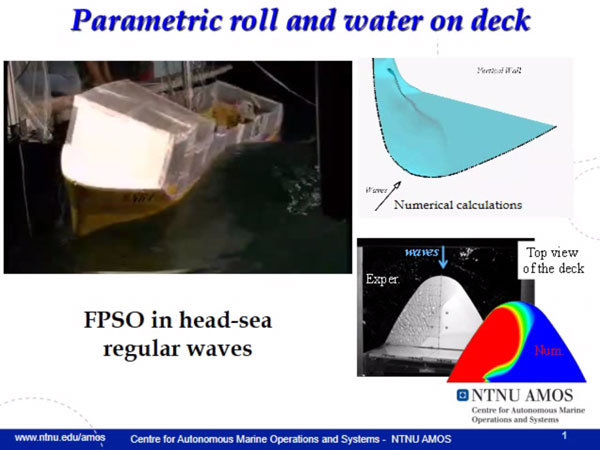
Parametric roll and water on deck on a FPSO in head-sea regular waves: