Neural interface and system overview
Neural interface and system overview
The MEA2100 system
 To interface the neuronal cultures we utilize the MEA2100 system from MultiChannel Sytems. This specialized microelectrode array (MEA) comprises of a tissue culture dish incorporating bidirectional electrodes which are situated within the extracellular environment of our biological neural network. The system is comprised of 60-electrode MEAs with an internal reference electrode and titanium nitride recording electrodes. The system enables acquisition and analysis of electrophysiological data from our biological networks where each electrode can detect the extracellular activity of nearby neurons. The system also enables electrical stimulation to the networks.
To interface the neuronal cultures we utilize the MEA2100 system from MultiChannel Sytems. This specialized microelectrode array (MEA) comprises of a tissue culture dish incorporating bidirectional electrodes which are situated within the extracellular environment of our biological neural network. The system is comprised of 60-electrode MEAs with an internal reference electrode and titanium nitride recording electrodes. The system enables acquisition and analysis of electrophysiological data from our biological networks where each electrode can detect the extracellular activity of nearby neurons. The system also enables electrical stimulation to the networks.
Closed-loop infrastructure
In order to enable embodiment of the neuronal cultures, we need a system which allows for real-time bidirectional communication between the culture and a robotic body. This is achieved by a closed-loop system where the neural recordings serve as motor instructions to the robot body, while sensory data from the robot is sent back to the culture through appropriate stimulation. This sensory feedback is essential in order to enable the network to learn from its environment.
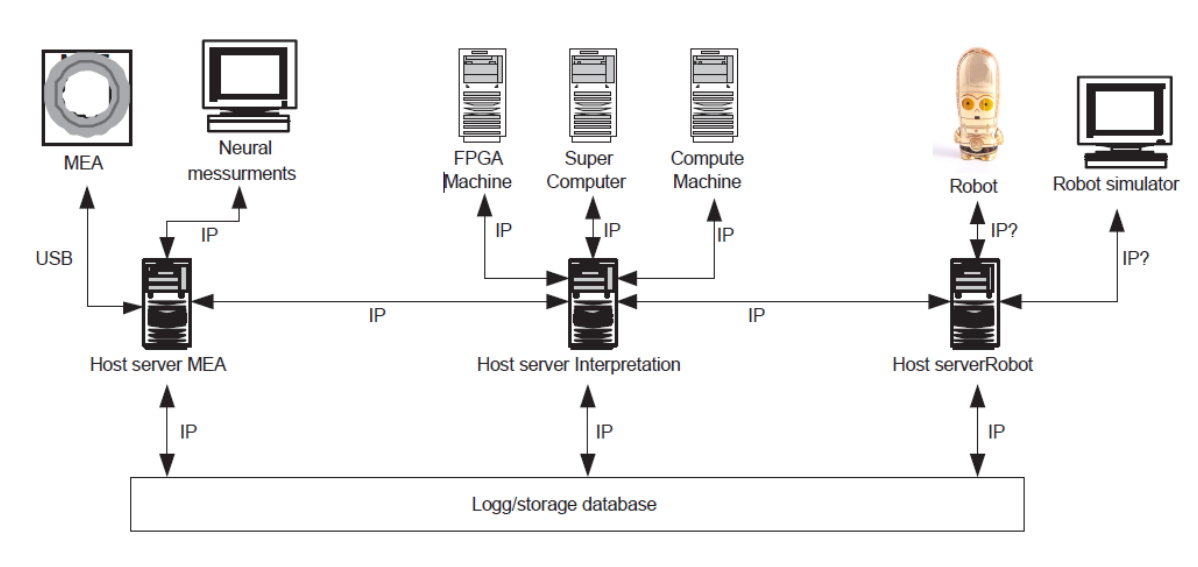
Our closed loop infrastructure consists of a four node system as shown below. The three main components for real-time operation include:
- The Host server MEA: establishes an interface between the MEA2100 (MultiChannelSystems, 2017b) and the rest of the network. This server provides clients with real- time MEA data and also performs MEA stimulation re- quests.
- The Host server Robot: establishes the bi-directional in- terface to the robotic body in which the biological net- works are embodied.
- The Host server Interpretation: the workhorse of this setup. This node is responsible for applying the necessary data transformation algorithms and training protocols between the MEA and the robot.
In addition to these, a fourth important component is the Storage database which logs all experimental data.