Teaching
TTK25 - Computer Vision for Control
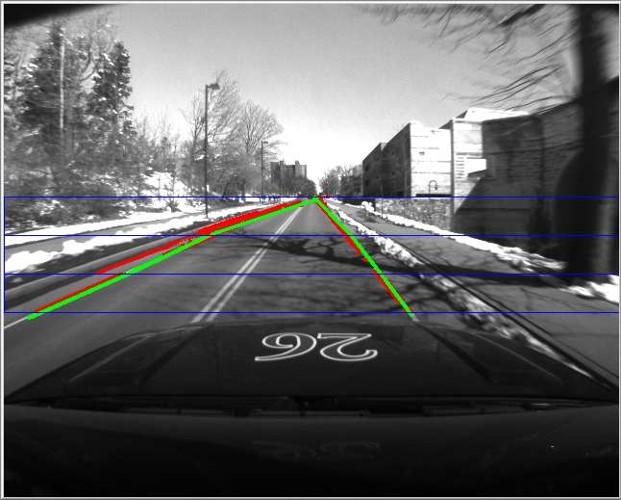
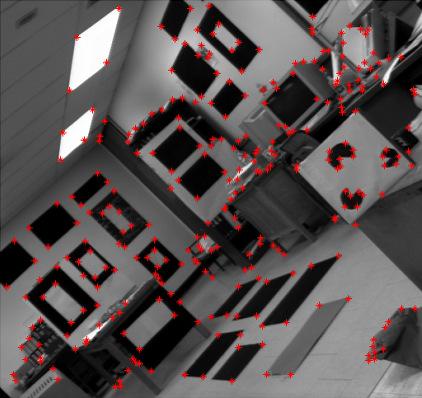
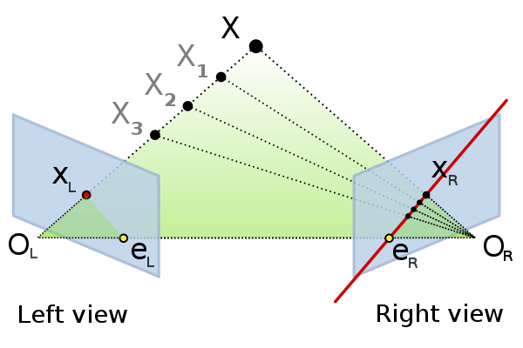
The course cover all the basics for computer vision, starting from projective geometry, the camera model and 3D geometry, to image segmentation and classification.
The instructors are the PhD Candidates Simen Haugo and Marco Leonardi
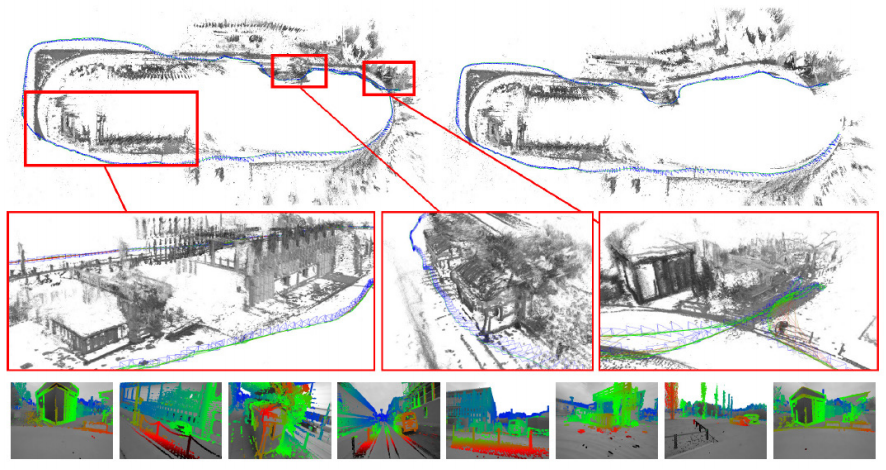
TTK21 - Introduction to Visual Simultaneous Localization and Mapping - VSLAM
The course will cover many of the most popular approaches to visual simoultaneous localization and mapping.
The lectures in this course will start after TTK25 ends, and will build upon many of the fundamental topics in computer vision taught in that course. We therefore recommend taking TTK25 before TTK21.
The instructors is the Associate Scientist Trym Vegard Haavardsholm