FishOtter - Fjord Systems - NTNU Ocean and Coast
FishOtter
By fusing autonomous vehicle technology, underwater wireless sensing and machine intelligence with current expertise in movement ecology and acoustic telemetry in Trondheimsfjorden, the project will push the operational capabilities of fish tracking beyond the constraints of current methods to generate datasets that can advance understanding of fish behaviour in coastal fjord ecosystems.
The project’s overall goal is to create a novel autonomous acoustic telemetry platform for the search, localisation, and tracking of fish and other evasive underwater targets by:
- Developing an autonomous multi-agent vehicle system capable of persistent search and high-fidelity tracking of free-ranging fish
- Validating the system in Trondheimsfjorden by quantifying the fine-scale movement patterns of key marine species
- Analysing collected datasets of selected species to interpret the underlying ecological drivers of the observed behaviours
The dynamics of animal populations and ecosystems are strongly influenced by the cumulative decisions and behaviours of individuals. Consequently, the capacity to resolve individual movement patterns and life histories underpins the science-based understanding and responsible management of fjord and coastal ecosystems, particularly as increasing anthropogenic pressures continue to change the marine environment.
Acoustic telemetry has emerged as an essential research tool for acquiring high-fidelity, individual-level movement data on fish and other marine animals. Such data are instrumental for characterising and understanding fundamental ecological processes, including habitat use, migration, foraging patterns and reproduction. Crucially, they also allow for quantifying behavioural responses to anthropogenic stressors in the marine environment such as pollution, infrastructure development, resource exploitation, and aquaculture, which are heavily concentrated in coastal zones such as Trondheimsfjorden.
Because of its unique capabilities, acoustic fish telemetry is a widely used tool among researchers both in Norway and internationally. However, current approaches face significant operational limitations and trade-offs since static receiver arrays often lack the scalability and spatiotemporal flexibility required to sufficiently adapt to the movements of free-ranging species, while manual active/mobile tracking is severely constrained by human endurance and logistics. In practice, researchers designing acoustic telemetry studies must therefore balance the observational resolution and spatial extent of their study area, often leading to spatial and temporal data gaps in the dataset, limiting ecological inference. Enhancing the technological capacity of acoustic telemetry thus represents a major opportunity to improve ecological insights and strengthen the science‑based management of fjord and coastal ecosystems across the globe.
By using NTNU’s strong traditions and expertise in both autonomous vehicle systems and acoustic fish telemetry the project this project will address these limitations. It will also utilise the university's existing research infrastructure, specifically its fleet of telemetry-capable surface vehicles (the FishOtters) and draw on ongoing collaborations with external stakeholders who are actively committed to the system's realisation.
Implementation: The project starts in June 2026 and is planned for two PhD scholarships (cybernetics + biology), of which one PhD is funded by NTNU Ocean and Coast.

Photo: FishOtter vehicle
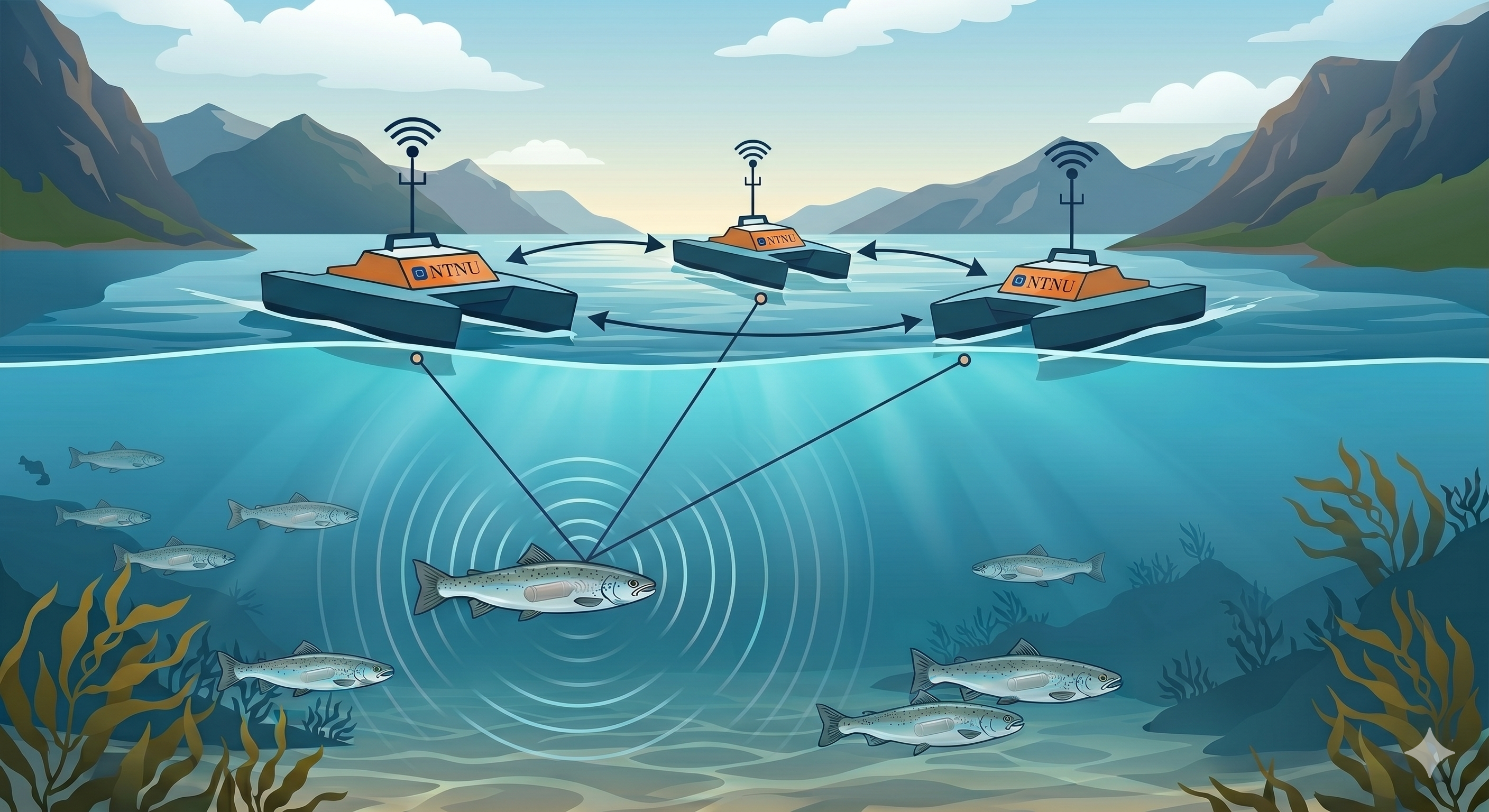
Illustration: Conceptual overview of multi-agent autonomous fish tracking system: Illustration: AI Google Gemini
Click on the illustration for larger version
Participants
-
Jan Grimsrud Davidsen Professor
+4792464314 jan.davidsen@ntnu.no Department of Natural History -
Sindre Håvarstein Eldøy Researcher
+4792266586 sindre.eldoy@ntnu.no Department of Natural History -
Martin Føre Associate Professor
martin.fore@ntnu.no Department of Engineering Cybernetics -
Tor Arne Johansen Professor
+47-73590395 tor.arne.johansen@ntnu.no Department of Engineering Cybernetics