Autosea
Autosea
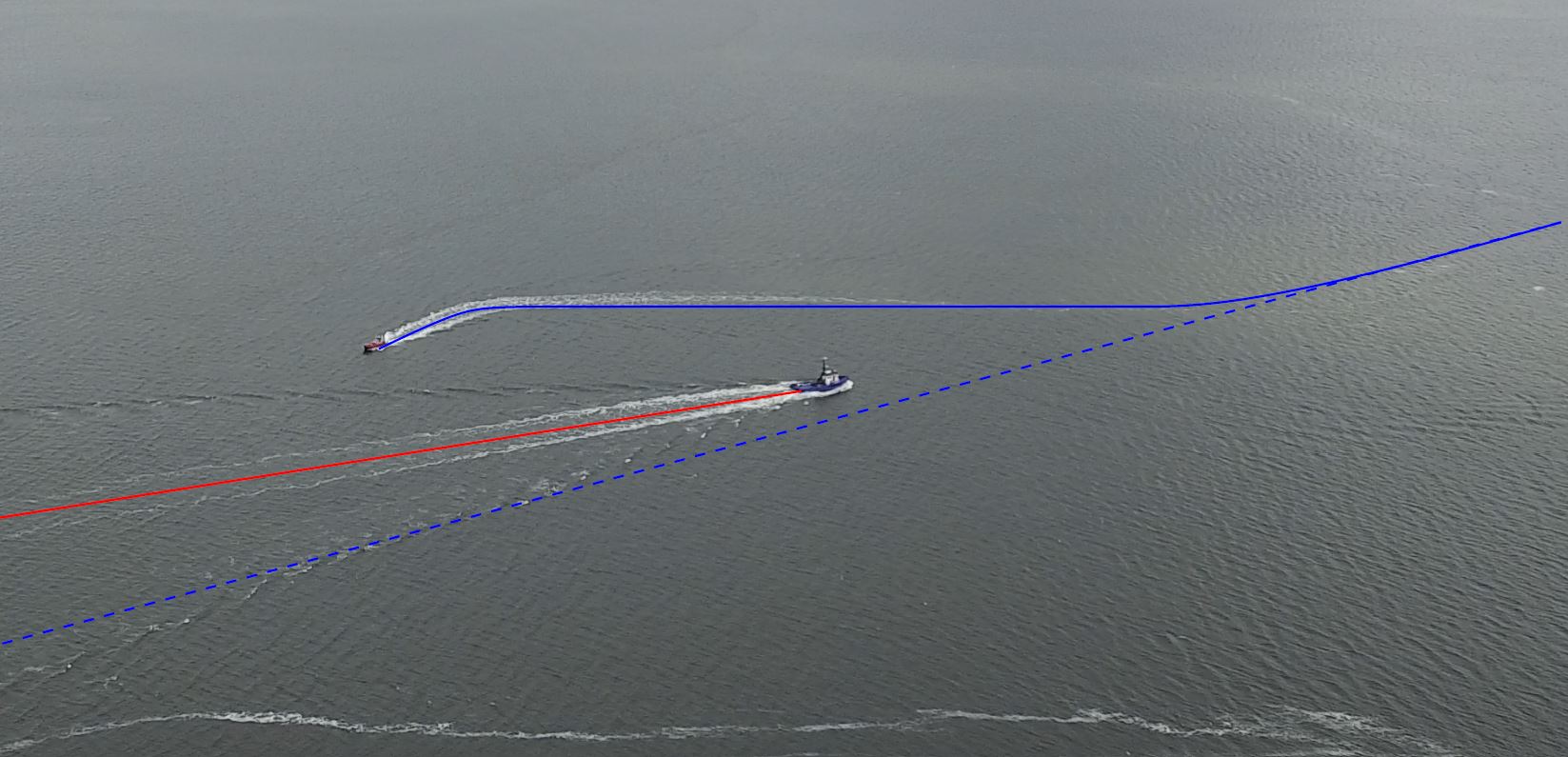
The main goal of the Autosea project is to develop methods for guidance and navigation of autonomous ships. A central component of this is collision avoidance, also known as sense-and-avoid. The Autosea project has demonstrated complete collision avoidance systems in full-scale experiments involving autonomous and semi-autonomous surface vehicles both in Trondheimsfjorden and in the Netherlands. The technology from the Autosea project will be used as a foundation for e.g. autonomous passenger ferries.
In the Autosea project researchers at NTNU collaborate closely with the consortium partners DNV GL, KONGSBERG and Maritime Robotics. All the partners have contributed by making their own surface vehicles available for the project, and also by making sensors, navigation technology, control systems and general know-how available for the project.



