AUV Remus 100

AUV Remus 100
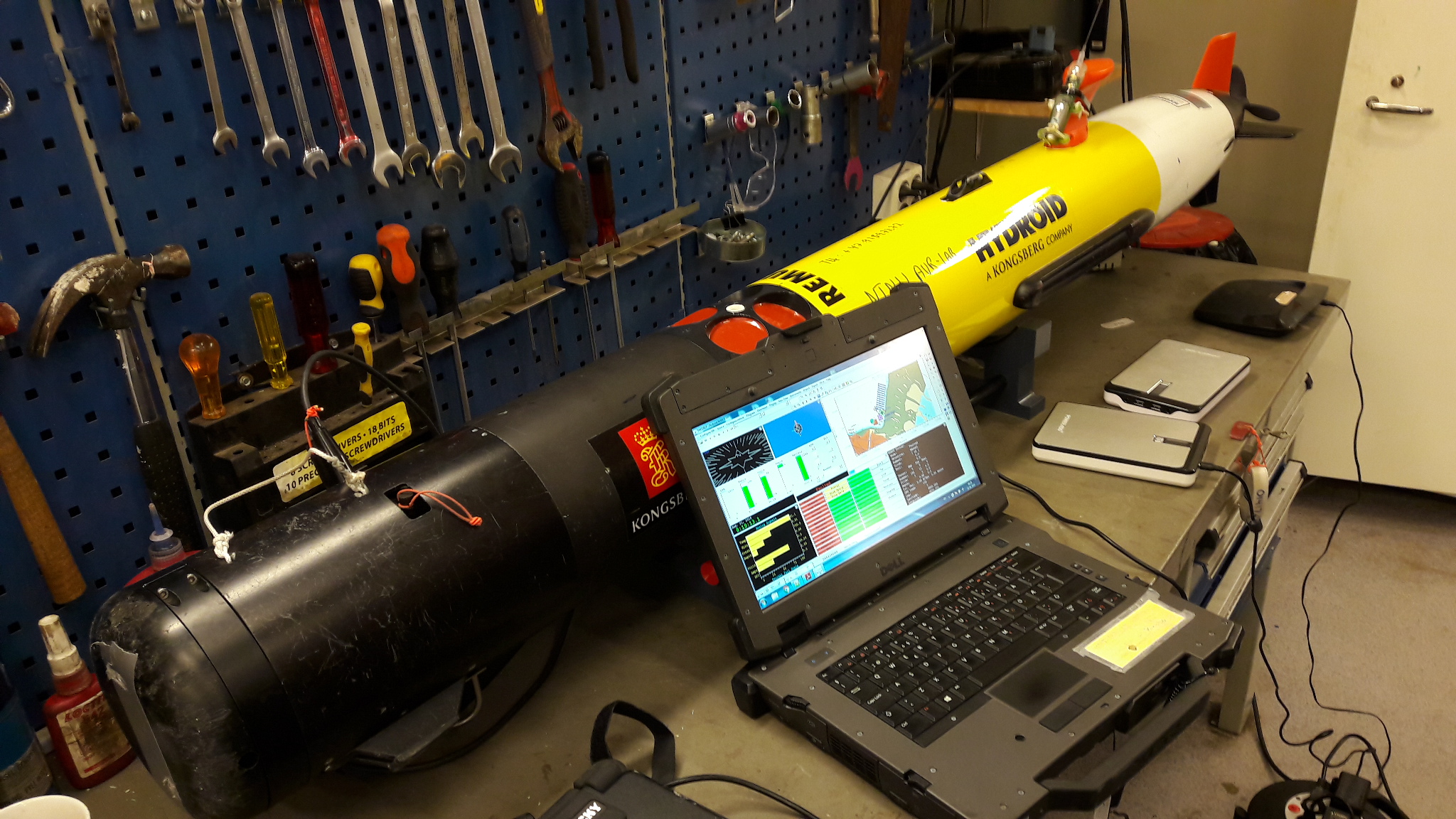
The workhorse of our submarine platforms has a large history of development. This makes it a robust, highly reliable instrument.
The Remus 100 has its own software for mission planning. Its modularity enables it to include new instruments on board. The vehicle is heavy for a person to carry it. A metallic frame is thus necessary to set it in the water.
Technical specifications
Max operational depth: 100m
Battery: Lithium Ion
Sensors
- Aanderaa Optode 4831 Oxygen sensor
- NBOSI Conductivity-temperature (CT) sensor
- ECO sensor WetLabs Triplet
- Long Base-line (LBL) High Frequency Transducer
- Inertial Measurement Unit (IMU) HG1700AG58
- 1200 kHz Explorer R100 Doppler Velocity Log (DVL)
- MSTL 900 kHz Sidescan sonar
- Global positioning system (GPS)
- Honeywell depth sensor
- Systron Donner gyro chip (not North-seeking)
- Magnetic compass
- DeltaT Multibeam Echosounder (MBES)
Consider it for
- Bathimetric mapping
- Water column characterization
- Substrate identification
- Environmental monitoring
- Biomass assessments